Nota enviada por Aníbal Arigo El éxito o rendimiento del vuelo liberado de un planeador F1A comienza, y depende en gran medida, del remolque previo.
El éxito o rendimiento del vuelo liberado de un planeador F1A comienza, y depende en gran medida, del remolque previo.
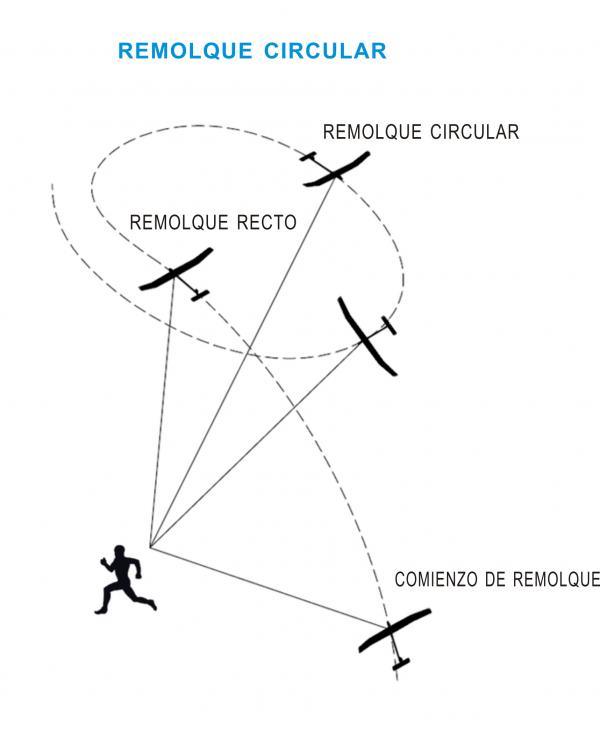
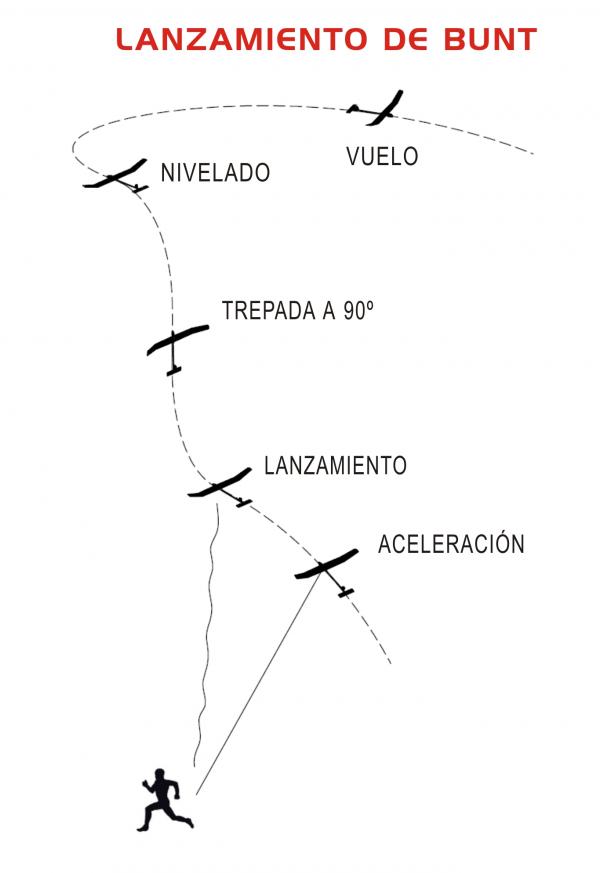
El remolque, por lo demás, puede ser dividido en dos etapas partes: la primera, que consiste en colocar el modelo en el aire, dirigirlo en forma recta contra el viento, efectuar un giro de 360 grados y volverlo a colocar recto contra al viento para efectuar un nuevo giro y, así, sucesivamente hasta que se decida pasar a la etapa o parte siguiente; y, la segunda, que comprende la fase de aceleración que la mayoría de los aeromodelistas comienzan en el primer cuarto del último giro, tensando la línea de remolque cuando el modelo va con viento de cola para que descienda y se acerque al suelo, a lo que le sigue un aumento en la tracción con el viento a 90 grados respecto al sentido de vuelo del modelo, de costado, perpendicular al modelo, que continúa con una trayectoria recta en contra del viento y que finaliza con la suelta cerca de la vertical.
Es importante que en y durante todo este proceso de remolque el modelo «siga» a quién lo remolque, que vaya hacia y haga lo que el remolcador quiera y decida —siempre que éste ejecute las maniobras que correspondan para que ello ocurra—; y no, por el contrario, que el remolcador tenga que seguir al modelo durante esta fase o parte del vuelo.
Especialmente porque cuando somos nosotros quienes decidimos qué hace el modelo, y no éste quien nos obliga a hacer algo, gastamos mucho menos energía. Y ello no es un dato menor en una competencia.
El presente presupone que el planeador es perfectamente simétrico; esto es, básicamente, que durante el remolque recto no tiene reviraduras o decalajes distintos en las semialas ni desviación en la aleta del timón que puedan afectar una trepada recta hasta arriba de la cabeza de quién lo remolca.
Las características del remolque de un F1A dependen de la posición del gancho, la cual es definida por las coordenadas «Xh» y «Zh», como lo muestra la figura que sigue.

Si «Xh» es demasiado pequeña el planeador no seguirá la dirección del remolque, podrá girar a la derecha o a la izquierda.
Si «Xh» es demasiado grande la tracción de la línea hacia abajo produce un efecto de nariz también hacia abajo y limita la trepada del planeador hasta el tope de la línea; como así también, reduce la sustentación necesaria en el ala para alcanzar altas velocidades y gran altura.
La posición vertical del gancho, «Zh», también afecta las características del remolque, pero de diferente manera.
Si «Zh» es demasiado grande, y la tracción de la línea es hacia el costado derecho del fuselaje, esta acción de tirar la línea en tal sentido hará rolar al planeador hacia una posición en que la puntera del ala izquierda baje, lo cual causará que el modelo gire o vire hacia la izquierda en lugar de hacerlo hacia la derecha como se desea.
La habilidad para dirigir un planeador usando la línea de remolque tirando o traccionando hacia un lado depende de muchos factores como la cantidad de diedro en las alas y el tamaño de la superficie vertical de cola.
La figura que sigue ilustra respecto a los tres ejes de estabilidad de un planeador: X, Y y Z.

El eje «X» es siempre definido como corriendo a lo largo del centro del fuselaje y en dirección exactamente opuesta al viento, por lo que a menudo es llamado eje de viento.
Para simplificar la cuestión, se asume que el modelo es simétrico respecto de este plano central vertical («X»).
El eje «Y» es perpendicular al plano central «X», y el eje «Z» es perpendicular a ambos, al «X» y al «Y».
Este sistema de ejes es útil para entender los movimientos laterales del planeador, como la dirección por haber ejercido tracción sobre la línea de remolque hacia un costado o lado. Cómo actúa una tracción hacia la derecha está explicado en la segunda figura por el hecho de que el vector del viento se muestra un tanto dirigido hacia la parte derecha del fuselaje. Esto es lo que típicamente sucede en un buen planeador cuando el remolcador tracciona o tira de la línea hacia la derecha del modelo causando un giro hacia la derecha; y el nombre común del ángulo entre la dirección del viento y el plano «XY» en el centro del modelo es llamado el ángulo de deslizamiento, e identificado con la letra o símbolo «B».
Cuando el planeador está en un giro tal, está también en un movimiento rotativo sobre todo respecto al eje «Z», y en general, en menor medida sobre los ejes «X» e «Y». Las letras o símbolos «P», «Q» y «R» son los nombre comunes para designar la rotación del modelo alrededor de los ejes «X», «Y» y «Z», respectivamente. El punto de intersección de estos tres ejes es definido como el centro de gravedad del modelo, una definición que simplifica el cálculo de los movimientos del modelo.
Por lo tanto, cuando el aeromodelista tracciona o tira la línea de remolque hacia la derecha respecto del plano central «XZ» con una fuerza de, por ejemplo, 45 gramos, tres movimientos ocurren simultáneamente:
1. El modelo desliza con ángulo «B».
2. El modelo rota alrededor del eje «X» a una velocidad «P», movimiento que es denominado «rolido».
3. El modelo rota alrededor del eje «Z» a una velocidad «R», movimiento que es llamado «guiñada».
Con el gancho de remolque ubicado como lo muestra la primer figura, la velocidad del rolido («P») será negativa, significando que la puntera de la semiala izquierda tenderá a ir hacia adelante más rápido que la puntera de la semiala derecha, dirigiendo el modelo hacia la derecha. La acción combinada de los movimientos señalados en los puntos 1 y 2 puede producir que la puntera de la semiala izquierda se levante por encima de la puntera de la semiala derecha y que como consecuencia un giro hacia la derecha del modelo (el movimiento descripto en el punto 3 es mayor o más importante que el especificado en el punto 2), o viceversa, un giro hacia la izquierda (el movimiento descripto en el punto 2 es mayor o más importante que el especificado en el punto 3), o ningún giro.
Para encontrar cual de las descriptas ganará esta batalla de fuerzas y momentos es necesario evaluar cuatro características del modelo, las que son conocidas como «derivadas de estabilidad». Ellas son:
1. El coeficiente del momento de guiñada gracias al deslizamiento «B», conocido como «CnB».
2. El coeficiente del momento de guiñada gracias al rolido «R», conocido como «Cnr».
3. El coeficiente del momento de rolido gracias al deslizamiento «B», conocido como «C1B».
4. El coeficiente del momento de rolido gracias al rolido «R», conocido como «Cir».
Los tres movimientos del modelo que ocurren cuando el gancho es tirado o traccionado en forma lateral o hacia un costado están representados por las siguientes ecuaciones:
La primera representa el efecto directo de la línea de remolque consistente en tirar del modelo hacia la derecha.
La segunda representa el efecto de giro sobre el modelo causado por el momento del largo del brazo «Xh».
La tercera representa el efecto de rolido sobre el modelo causado por el momento del largo de brazo «Zh».
La fuerza de costado sobre el gancho de remolque es representada como «SF».
Las ecuaciones son:
SF + CyB B q s + Cyr R q S = 0
SF Xh — CnB b q S — Cnr R b q s = 0
SF Zh + C1B B q s + Cir R b q s 0 =
Donde:
b es la envergadura del modelo.
S es la superficie del ala.
q es la presión dinámica.
Aquí debe notarse que estas ecuaciones están agregadas a las dos ecuaciones que representan el movimiento hacia adelante del modelo, o ecuaciones de remolque, para el remolque recto sobre o hasta arriba de la cabeza.
A las tres ecuaciones se les ha dado el nombre de «ecuaciones de dirección y estabilidad», o de «ecuaciones de dirección» para ahorrar palabras.
Las ecuaciones de dirección necesarias para encontrar o resolver «B» y «R» desconocidas en orden a determinar el efecto de cualquier fuerza lateral o de costado «SF» son las dos últimas. La primera es redundante y es incluida en aras de la exhaustividad.
Si «D» (que es igual a C1B Cnr – CnB Cir) es mayor que cero el planeador tendrá estabilidad contra el tirabuzón o espiral en el planeo en vuelo libre; el modelo no irá en una espiral descendente o hacia abajo durante el planeo, asumiendo que no tiene reviraduras en el ala o deflecciones importantes en la aleta del timón.
Para asegurar la estabilidad contra la espiral es tener una suficiente cantidad de diedro, desde que «C1B» es directamente proporcional a la cantidad de diedro, con la superficie cercana a las punteras siendo más efectiva que la porción de ella cercana al centro.
El parámetro de estabilidad o derivada «CnB» es proporcional a ambos, el timón o superficie del área vertical y al largo o altura del timón; y usualmente esta estabilidad contra la espiral puede ser asegurada mediante el agregado de suficiente diedro, teniendo limitada el área del timón o de la superficie vertical a la cantidad necesaria para prevenir el «Dutch Roll», que consiste en las oscilaciones en el vuelo planeado. También la ubicación del timón debe ser tan larga (tail lenght) como se pueda, dado que «Cnr» es proporcional al cuadrado del largo, donde «CnB» sólo varía solo la longitud de la primera potencia. La derivada «Cir» es aproximadamente igual al negativo (-) del coeficiente de sustentación del ala dividido por cuatro y que no puede ser rápidamente ajustado o reajustado para obtener la estabilidad contra espiral deseada.
Ref.: Tow—Hook position effects on F1A Glider Steering, Andrew B. Bauer, NFFS, Simposium 1997.
Concordia, 20 de noviembre de 2010.